






Raddrehzahl-Sensor (ABS-Sensor) und Polrad. Bilder: Serge Heinen
Raddrehzahl-Sensoren: Technik und Fehlerdiagnose
Die zuverlässige Funktion moderner Bremssysteme hängt maßgeblich von der Erfassung relevanter Fahrzustandsgrößen ab. Eine der wichtigsten Messgrößen sind dabei die jeweiligen Raddrehzahlen. Aus den Werten lassen sich unmittelbar Rückschlüsse auf das Fahr- und Bremsverhalten ableiten.
Kommt es beispielsweise während eines Bremsvorgangs dazu, dass die aufgebrachte Bremskraft die übertragbare Haftreibung zwischen Reifen und Fahrbahn überschreitet, sind gravierende Beeinträchtigungen der Lenkfähigkeit sowie der Fahrstabilität möglich. Um dem entgegenzuwirken, überwacht das Antiblockiersystem permanent die jeweiligen Raddrehzahlen. Ziel ist es, den Schlupf in einem Bereich zu halten, der eine möglichst hohe Bremskraftübertragung bei gleichzeitig ausreichender Seitenführung ermöglicht. Die Regelung, also die gezielte Anpassung des Bremsdrucks, erfolgt automatisch und unabhängig vom Fahrereingriff.
Der ‚Schlupf‘
Der sogenannte ‚Schlupf‘ beschreibt die Differenz zwischen der Umfangsgeschwindigkeit des Rades und der Fahrzeuggeschwindigkeit. Ein gewisser Schlupf ist für die Übertragung von Brems- und Antriebskräften erforderlich, während ein zu hoher Schlupf zum Verlust der Haftung führt.
- Null Prozent: Rad rollt ohne Schlupf
- 10 – 20 Prozent: optimaler Schlupfbereich für maximale Bremskraft
- 100 Prozent: Rad blockiert vollständig
Drehzahlsensoren: Typen
Zur Erfassung von Raddrehzahlen kommen verschiedene Sensortypen zum Einsatz, die sich nach ihrem Funktionsprinzip in aktive und passive Sensoren unterteilen. Hierzu zählen aktive Sensoren, die auf dem Hall- oder magnetoresistiven Prinzip basieren sowie passive Sensoren, die nach dem Induktionsprinzip arbeiten. Alle funktionieren kontaktlos und unterliegen keinem Verschleiß.
Aufgrund ihrer robusten und einfachen Bauweise ist der Einsatz induktiver Raddrehzahl-Sensoren im Lkw-Bereich weit verbreitet. Trotz ihrer im Vergleich zu aktiven Sensoren größeren Bauform zeichnen sie sich durch eine einfachere und kostengünstigere Technik aus. Sie gelten als besonders widerstandsfähig gegenüber äußeren Einflüssen wie Feuchtigkeit, Schmutz und Vibrationen. Hallsensoren erreichen zwar eine vergleichbare Zuverlässigkeit, benötigen aber eine komplexere (siehe Infokasten) Elektronik. Induktive Sensoren benötigen keine externe Spannungsversorgung, da sie ihre Signalspannung selbst durch das Induktionsverfahren erzeugen. Somit lässt sich nicht nur die Systemkomplexität vereinfachen, sondern auch die Anfälligkeit möglicher Fehlfunktionen reduzieren. Darüber hinaus zeichnen sich induktive Sensoren durch eine hohe Temperaturbeständigkeit in Hinblick auf die thermischen Belastungen bei Bremsanlagen aus.
Induktionssensoren – das Funktionsprinzip
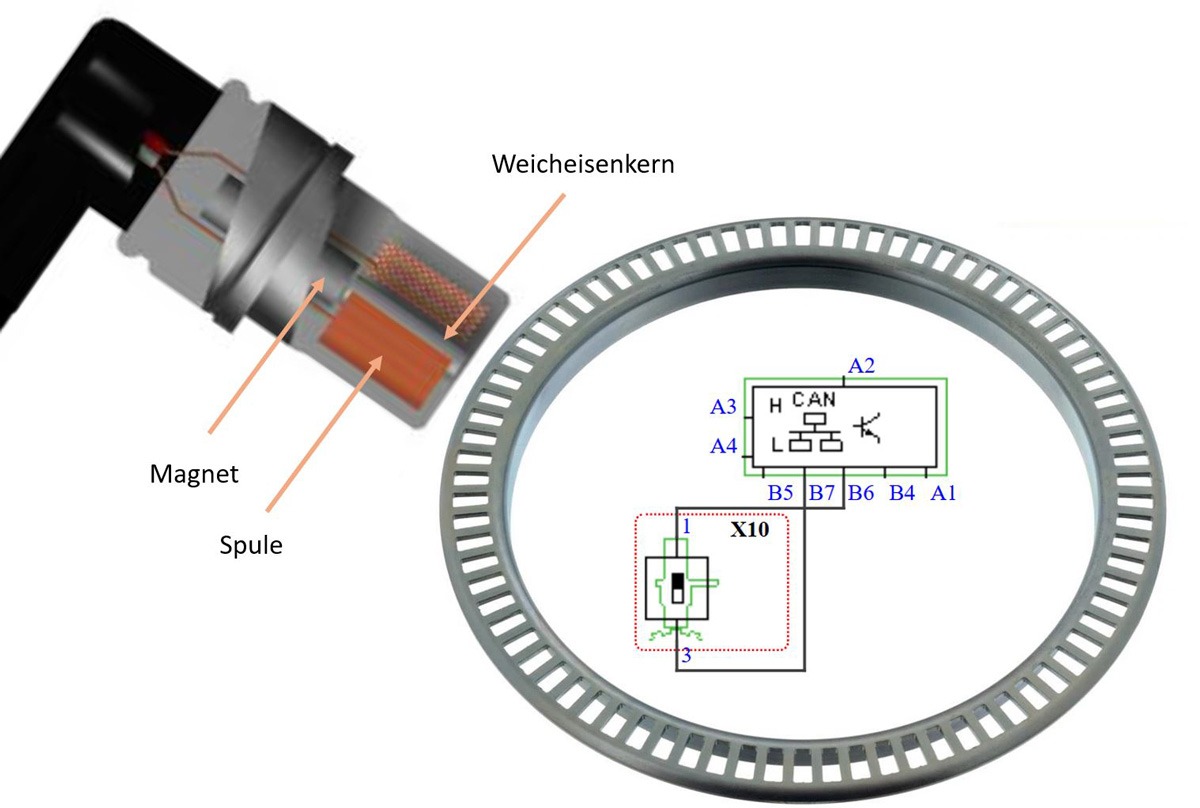
Das Funktionsprinz des induktiven Raddrehzahl-Sensors basiert auf der elektromagnetischen Induktion. Der Sensor besteht im Wesentlichen aus einem Permanentmagneten, einem Weicheisenkern sowie einer um den Kern gewickelten Spule. Gegenüber dem Sensor ist ein Impulsrad angeordnet, das auch als ferromagnetischer Zahnkranz ausgeführt sein kann. Es ist in der Regel fest mit dem Radlager verbunden.
Der Permanentmagnet erzeugt ein statisches Magnetfeld, welches über den Eisenkern zum Sensorkopf geführt wird. Zwischen Sensor und Impulsrad entsteht ein magnetischer Kreis. Dreht sich das Rad, bewegen sich die Bezugsmarken (Zähne oder Lücken des Impulsrades) am Sensorkopf vorbei und verursachen eine ständige Änderung des magnetischen Widerstands im magnetischen Kreis. Während zum Beispiel ein Zahn vor dem Sensor einen niedrigen magnetischen Widerstand und damit einen hohen magnetischen Fluss verursacht, führt eine Lücke zu einem höheren Widerstand und einem geringeren Fluss. Durch die wiederkehrende Veränderung des magnetischen Flusses entsteht in der Spule eine Wechselspannung. Deren Größe wird sowohl von der Anzahl der Spulenwindungen als auch von der Geschwindigkeit der Flussänderung bestimmt. Das entstehende Signal ist sinusförmig und weist eine Frequenz auf, die direkt proportional zur Drehzahl des Rades ist. Mit zunehmender Drehzahl steigt die Amplitude der Spannung an.
Info! Bei sehr niedrigen Drehzahlen entstehen nur geringe Spannungen, bei Stillstand wird kein Signal erzeugt. In der Praxis wird das Sensorsignal im Steuergerät verstärkt, gefiltert und in ein digitales Signal umgewandelt, um daraus die Raddrehzahl zu berechnen.
Für die Funktion und Signalqualität sind mehrere Einflussgrößen entscheidend. Besonders wichtig ist der Luftspalt zwischen Sensor und Impulsrad, der sich typischerweise im Bereich von etwa 0,5 bis 1,5 mm bewegt. Ein zu großer Abstand führt zu einer geringeren Signalspannung, während ein zu kleiner Abstand mechanische Beschädigungen verursachen kann. Auch der Zustand des Impulsrades spielt eine wesentliche Rolle, da Verschmutzungen, Rost oder beschädigte Zähne das Spannungssignal negativ beeinträchtigen.
Hallsensoren – das Funktionsprinzip
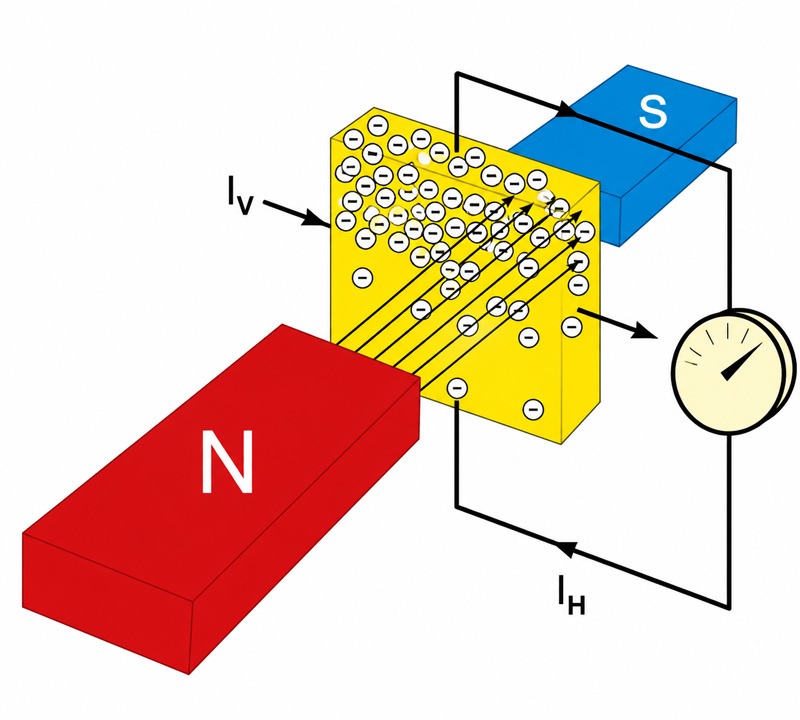
Zur Drehzahlerfassung mittels Hallsensoren wird eine externe Versorgungsspannung benötigt. Der Sensor setzt sich aus einem Halbleiterelement, einem Dauermagneten sowie einem Hall-IC zusammen, das integrierte Schaltkreise und Transistoren umfasst.
Über das Hall-IC kann die sogenannte Lorentzkraft ermittelt werden. Wirkt auf einen stromdurchflossenen Halbleiter ein Magnetfeld, so entsteht ein Halleffekt und eine damit verbundene Hallspannung.
Die Signalspannung steht in Abhängigkeit zum Magnetfeld und der Versorgungsspannung, da die Stromstärke durch den Halbleiter konstant bleibt. Mit zunehmender Drehzahl ändert sich die Frequenz des auftretenden Signals, nicht aber die Höhe der Signalspannung.
Magnetoresistive Sensoren
Magnetoresistive Sensoren nutzen die Eigenschaft, dass sich der elektrische Widerstand eines Werkstoffs durch ein äußeres Magnetfeld verändert. Damit sind sie unempfindlicher gegenüber größeren Luftspalten zwischen Sensor und Impulsring. Der Impulsring besteht aus abwechselnden Nord- und Südpolen. So lässt sich ein wechselndes Magnetfeld erzeugen. Zur Erfassung des Magnetfelds enthält der Sensor magnetoresistive Elemente.
Der Winkel zwischen dem Magnetfeld und der Stromrichtung durch die Widerstände verändert sich mit der Radgeschwindigkeit. Dadurch ändert sich der Widerstandswert der magnetoresistiven Elemente. Die integrierte Elektronik wandelt die Widerstandsänderung in ein für das Steuergerät auswertbares Signal um.
Die Fehlersuche
In der Werkstattpraxis äußern sich Störungen der Raddrehzahl-Sensoren auf unterschiedliche Weise. Häufig treten bei sehr niedrigen Geschwindigkeiten Signalverluste auf, insbesondere bei älteren, induktiven Sensoren. Zudem können sporadische Ausfälle vorkommen, die meist auf beschädigte Leitungen oder schlechte Kontaktstellen zurückzuführen sind. Auch ein beschädigtes Impulsrad kann die Signalqualität beeinträchtigen. Kommt es zu einem vollständigen Ausfall, liegt die Ursache meist am Sensor selbst oder in einer Leitungsunterbrechung.
In der Regel sind die Raddrehzahl-Sensoren direkt an ein ABS- oder Bremsmodulator-Steuergerät angebunden, das über eine integrierte Eigendiagnose verfügt und auftretende Fehler selbstständig erkennt. So können Komponenten wie Sensoren, elektrische Leitungen, Steckverbindungen, Magnetventile beziehungsweise Modulatoren sowie entsprechende Versorgungsspannungen überwacht werden. Je nach Hersteller und Ausführung werden weitere Komponenten einbezogen.
Die Überwachung erfolgt auf unterschiedlichen Ebenen. Neben der Erkennung elektrischer Fehler wie Leitungsunterbrechungen, Kurzschlüssen oder unplausiblen Spannungswerten überprüft das Steuergerät auch die Sensorsignale sowie die Ansteuerung der Aktoren auf Plausibilität. Dabei erfolgt zum Beispiel ein Vergleich der Raddrehzahlen untereinander sowie mit den in Kennfeldern definierten Referenzwerten.
Wird ein Fehler erkannt, speichert das System ihn im Fehlerspeicher ab und informiert den Fahrer über eine entsprechende Fehlermeldung im Kombiinstrument. Je nach Art und Schwere des Fehlers kann die ABS-Regelfunktion eingeschränkt oder vollständig deaktiviert werden, ohne dabei aber die grundlegende Bremsfunktion zu beeinträchtigen.
Zur Eingrenzung der Fehlerursache sollte ein Diagnosevorgang grundsätzlich immer mit dem Auslesen des Fehlerspeichers beginnen. Im Vorfeld empfiehlt sich die Bordnetzspannung über ein geeignetes Batterieladegerät zu stabilisieren. Die ausgelesenen Fehlercodes liefern gezielte Hinweise auf betroffene Komponenten und ermöglichen eine systematische Eingrenzung der Fehlerursache. Ergänzend können je nach Steuergerät und dem verwendeten Diagnosetester auch diverse Parameter dargestellt werden.
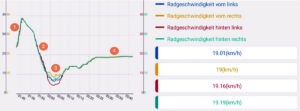
Beispiel: Fehlermeldung
Liegt beispielsweise die Fehlermeldung ‚Raddrehzahl-Sensor Vorderachse links – Signal fehlt oder unplausibel‘ vor, lassen sich die Raddrehzahlen der einzelnen Räder im Fahrbetrieb oder auf dem Prüfstand einfach miteinander vergleichen. Somit sind abweichende Drehzahlen oder Signalunterbrechungen schnell und einfach feststellbar.
Sind diese Werte nicht einsehbar oder führen zu keinem weiterentscheidenden Arbeitsschritt, empfiehlt es sich, die Fehlereinträge zu notieren und den Fehlerspeicher zu löschen. Somit lässt sich nachvollziehen unter welchen Betriebsbedingungen der Fehler auftritt. Dies kann nach dem Einschalten der Zündung erfolgen oder bei einer Probefahrt. Tritt der Fehler unmittelbar nach dem Einschalten der Zündung auf, kann dies ein Indiz für einen defekten Sensor oder einen Fehler in der Verkabelung sein.
Ergänzend zu den Arbeiten mit dem Diagnosetester ist eine Sichtprüfung unerlässlich. Dabei sind insbesondere Leitungen, Steckverbindungen sowie die Sensoren selbst auf Beschädigungen, Verschmutzungen oder Korrosion zu überprüfen. Auch der Luftspalt zwischen Sensor und Impulsrad sollte kontrolliert werden, da Abweichungen vom Sollabstand die induzierte Signalspannung beeinflussen können. Zur weitergehenden Prüfung ist der Einsatz eines Oszilloskops zielführend.
Oszilloskop und Multimeter
Mit einem Oszilloskop lassen sich die Sensorsignale direkt darstellen und hinsichtlich Signalform, Amplitude und Frequenz bewerten. Unregelmäßigkeiten im Signalverlauf, Aussetzer oder Verzerrungen können auf Defekte am Sensor, am Impulsrad oder auf Leitungsprobleme hinweisen. Zudem können Plausibilitätsfehler zuverlässig erkannt werden.

Steht kein Oszilloskop zur Verfügung, kann alternativ auch ein Multimeter eingesetzt werden, um grundlegende Überprüfungen am Sensor durchzuführen. So lässt sich bei abgezogenem Stecker der Widerstand der Sensorspule messen. Ein unendlicher Widerstand deutet auf eine Leitungsunterbrechung hin, während ein sehr geringer Widerstand auf einen Kurzschluss schließen lässt. Je nach Hersteller beträgt der Wert eines funktionstüchtigen Sensors zirca 1,0 bis 1,3 KΩ.
Zusätzlich lässt sich im eingebauten Zustand das Drehzahlsignal in Form einer Wechselspannung messen. Dazu stellt man das Multimeter auf Wechselspannung (AC) ein und legt die Messspitzen parallel zum Sensor an. Voraussetzung für ein entsprechendes Messergebnis ist, dass das Rad in Drehbewegung versetzt wird. Dabei erzeugt der Sensor eine drehzahlabhängige Wechselspannung, die mit zunehmender Drehzahl ansteigt. Bei der Messung ist darauf zu achten, dass das Rad ausreichend schnell gedreht wird. Als grobe Richtlinie gilt, dass mit einer Umdrehung alle zwei Sekunden eine Wechselspannung von etwa 200 bis 250 mV messbar ist. Bleibt die Spannung aus oder ist deutlich geringer als erwartet, deutet dies auf einen defekten Sensor, einen zu großen Luftspalt oder Probleme am Impulsrad hin. Zusätzlich sollten Leitungen und Steckverbindungen auch unter Last geprüft werden, um mögliche Beschädigungen oder Kontaktprobleme zu erkennen.
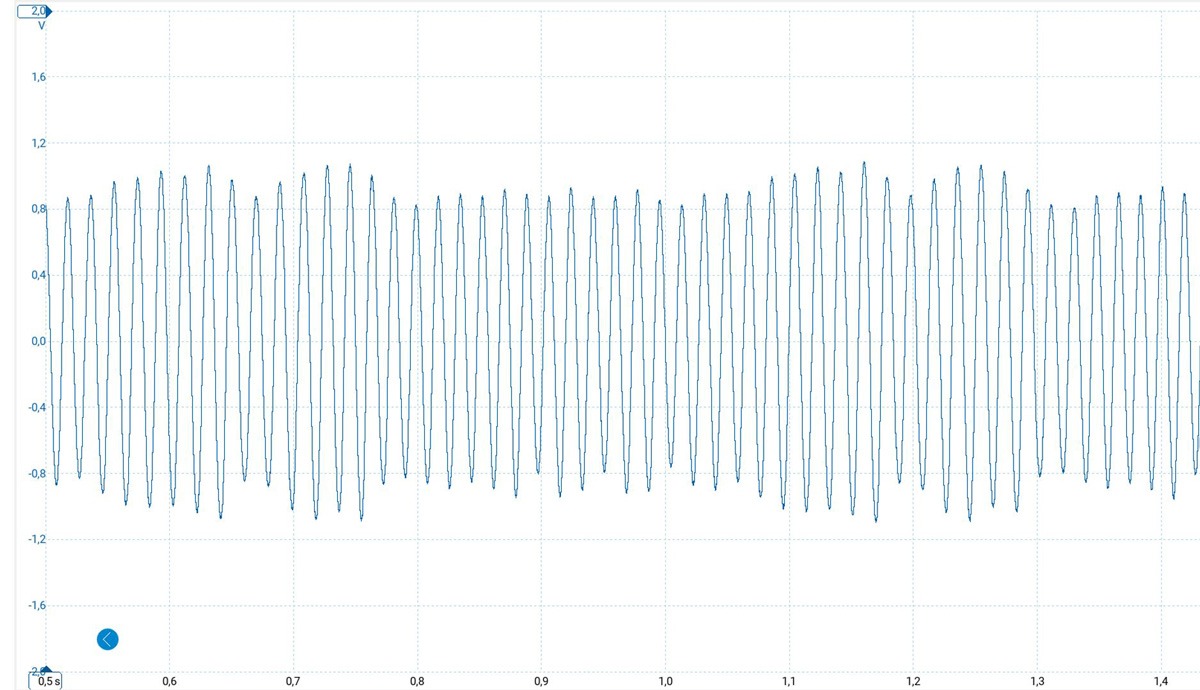
Durch den Einsatz eines Oszilloskops lassen sich einige der zuvor beschriebenen Prüfschritte umgehen. Entspricht das gemessene Ausgangssignal einer gleichmäßigen, sinusförmigen Wechselspannung, kann der Sensor grundsätzlich als funktionsfähig bewertet werden. Die Prüfung sollte jedoch ebenfalls mit ausreichend hohen Raddrehzahlen erfolgen.
Darüber hinaus ist eine grafische Darstellung des Sensor-Signals besonders bei sporadisch auftretenden Fehlern hilfreich. Häufig sind diese temperatur- oder vibrationsabhängig und treten erst unter realen Fahrbedingungen auf.
Sind am Sensor und an der Verkabelung keine Fehler feststellbar, sollte man prüfen, ob bei vorangegangenen Austauscharbeiten (zum Beispiel an der Radlagereinheit) ausschließlich passende und achsidentische Bauteile verwendet wurden. Unterschiede sowohl zwischen den Achsen als auch innerhalb einer Achse, beispielsweise bei Sensoren oder Impulsringen, können zu unplausiblen Signalen führen.
Last but not least sind auch softwareseitige Ursachen in Betracht zu ziehen, beispielsweise Inkompatibilitäten zwischen Zugmaschine und Anhänger oder fehlerhafte Parametrierungen der Steuergeräte.
Den Beitrag finden Sie auch in der Print-Ausgabe 2-2026 der Krafthand-Truck.
Weitere Themen:

Verzögerungs-Taktik
Mit der Einführung neuer Sicherheitssysteme im Zuge der EU-weit geltenden General-Safety-Regulation (GSR) ist die Trailer-Technik noch ein Stück komplexer geworden, speziell im Bereich Bremse. Deshalb bekommt es der Nutzfahrzeug-Profi künftig öfter mit Künstlicher Intelligenz (KI) zu tun. Was können moderne Trailer-Bremssysteme? … weiter

Schlüsseltechnologie Thermomanagement
Das Thermomanagement spielt bei E- und FCEV-Trucks eine zentrale Rolle. Neben dem Heizen und Kühlen der Fahrerkabine kommt das Temperieren der Batterie (der Brennstoffzelle) und der Leistungselektronik hinzu. Da es für die optimale Zu- und Abfuhr von Wärme nur ein enges Temperaturfenster gibt, steht beim künftigen Klima-Service die Wartung, Diagnose und Reparatur der verschiedenen Kälte- und Kühlkreisläufe im Fokus. … weiter

Gradmesser
Unter verschiedenen Betriebsbedingungen treten je nach Baugruppe bei Nutzfahrzeugen unterschiedliche Temperaturen auf. Die Werte erstrecken sich von extrem hohen bis hin zu deutlich niedrigeren Werten. Zahlreiche Sensoren dienen der Überwachung der Temperaturen. Wir liefern einen Überblick über Funktion und Diagnoseoptionen. … weiter

HELLA: Aftermarket-Parts, Thermomanagement und Lichttechnik
HELLA Aftermarket, das freie Ersatzteil- und Werkstattgeschäft des internationalen Automobilzulieferers FORVIA HELLA, ist im Nutzfahrzeugsegment breit aufgestellt. Neu sind rund 500 Artikelnummern zum Thema Thermomanagement für Lkw. Das Angebot wird stetig ausgebaut. … weiter

Unterwegskontrolle: Bremsanlage – OK oder Totalausfall?
Trotz moderner Fahrzeugflotten auf deutschen Straßen, fallen regelmäßig Fahrzeuge mit gravierenden Mängeln an der Bremsanlage auf. Die Technische Unterwegskontrolle (RL 2014/47/EU) stellt die gesetzliche Grundlage zur Kontrolle von Nutzfahrzeugen auf Straßen und Parkplätzen dar. Wir liefern einen exklusiven Einblick. … weiter

Der NOx-Sensor: Funktion, Diagnose, Ausfallursachen
Mit Hilfe eines NOₓ-Sensors kann die Stickoxidkonzentration im Abgas ermittelt und zur effektiven Regelung und Überwachung von Abgasnachbehandlungssystemen herangezogen werden. Je nach Komplexität der Abgasanlage können mehrere Sensoren verbaut sein. Wir werfen einen Blick auf die Funktion, die Fehlerdiagnose und die Ausfallursachen. … weiter

Das Oszilloskop im Werkstattalltag – Diagnose für Kurvenkünstler
Lange Zeit galt die Steuergerätediagnose als allein zielführender Weg, um Probleme an der Elektrik und Elektronik aufzuspüren. Doch mit der wachsenden Zahl an Sensoren und Aktoren, der zunehmenden Vernetzung und dem Einzug von Datenbus-Systemen sind zusätzliche Fehlersuch-Methoden gefragt. Verstärkt kommen dabei Oszilloskope zum Einsatz. … weiter

Drucküberwachung: MAP-Sensoren und Turbolader im Wechselspiel
Überall dort, wo Nutzfahrzeuge im Einsatz sind, kommt es auf Leistung, Zuverlässigkeit und Kraftstoffeffizienz an. Aspekte, die eng mit der Motoraufladung verknüpft sind. Unter Motoraufladung versteht man die Vorverdichtung der Ansaugluft, die dem Motor zugeführt wird, bevor sie in den Brennraum gelangt. Hierbei spielt der Ansaugdrucksensor eine zentrale Rolle. … weiter

Service und Fehlersuche am AdBlue-Einspritzsystem
Seit der Einführung der Euro-Abgasnormen 4 und 5 sowie der Euro VI im Jahr 2014, steigt die Zahl der Nutzfahrzeuge, die mit einem Harnstoff-Einspritzsystem ausgestattet sind, kontinuierlich. Heute verfügen die allermeisten Lkw über eine SCR-Anlage. Die von Bosch entwickelte und 2005 erstmals in einen Lkw eingebaute ‚Denoxtronic‘ gehört zu den am weitesten verbreiteten Systemen. Wir liefern einen Überblick über mögliche Schäden und Service-Optionen. … weiter