






CAN-FD – das Upgrade, das den Fahrzeugbus neu definiert

In den letzten Jahren stieg die Datenmenge, die innerhalb eines Fahrzeugs zwischen den Steuergeräten oder zwischen dem Fahrzeug und externen Schnittstellen ausgetauscht werden muss, kontinuierlich an. Hervorgerufen durch immer ausgereiftere Sicherheitssysteme, komplexere Motorsteuerungen und nicht zuletzt durch immer tiefgreifendere Anforderungen der Gesetzgeber, nimmt der Datenfluss Ausmaße an, die durch den klassischen CAN-Bus nicht mehr zu bewältigen sind.
Datenbussysteme wie FlexRay oder auch Ethernet wären zwar in der Lage, die anfallende Menge an Daten in ansprechender Zeit zu bewältigen, allerdings sind diese deutlich kostenintensiver und komplexer im Aufbau. Ein neuer Datenbus musste her, oder eben ein Upgrade des vorhandenen CAN-Bus.
Bosch stellte erste Erweiterung des CAN-Busses vor
2012 stellte Bosch zum ersten Mal eine Erweiterung für den CAN-Bus vor, den CAN-FD. 2015 wurde die Erweiterung als Standard in der DIN ISO 11898-1:2015 definiert, seit 2018 kommt der CAN-FD in Kraftfahrzeugen zum Einsatz.
Die Idee dahinter ist ganz einfach. Obwohl der CAN-Bus ereignisgesteuert ist (das bedeutet, dass der Bus als Multi-Master-System aufgebaut ist), so überträgt er meist nur eine Botschaft eines Steuergeräts. Nur während der Arbitrierung und während der Bestätigung kann es vorkommen, dass mehrere Steuergeräte gleichzeitig senden und somit eine Mindestdauer für Bits erforderlich ist.
Die Arbitrierung findet ganz zu Beginn der Botschaft über den Identifier statt, die Bestätigung erfolgt am Ende einer Botschaft. Dazwischen sind Empfänger und Sender fest zugeordnet. Hier setzt die Idee zum CAN-FD an. Dabei steht ‚FD‘ für Flexible Data-Rate (Flexible Datenrate). Eigentlich müsste es heißen: CAN mit flexibler Datenrate und erhöhter Datenmenge.
CAN-FD kann eine Datenmenge von bis zu 64 anstatt bis zu 8 Byte wie der CAN-Bus, mit einer Geschwindigkeit bis zu 10 Mbit/s übertragen.
Und auch wenn die Arbitrierung und die Bestätigung noch in gewohnter Geschwindigkeit von maximal 1 Mbit/s erfolgt (die maximale Datenmenge aber um das Achtfache zugenommen hat), erhöht sich die Nettodatenübertragungsrate deutlich.
Eigenschaften des CAN-FD
Der große Vorteil gegenüber einem komplett neuen Bussystem besteht darin, dass der CAN-FD abwärtskompatibel ist. Das bedeutet, dass neue CAN-FD-taugliche Controller auch mit dem ‚alten‘ CAN-Bus arbeiten können. Somit ist es für die Hersteller einfach, CAN-Systeme nach und nach umzustellen, je nach Anforderung. Bestehende Topologien, also bestehende Vernetzungen und somit bestehende Kabelbäume, können selbst bei einem Umstieg von CAN auf CAN-FD beibehalten werden. Busalternativen wie Flexray oder Ethernet sind deutlich aufwendiger und somit teurer.
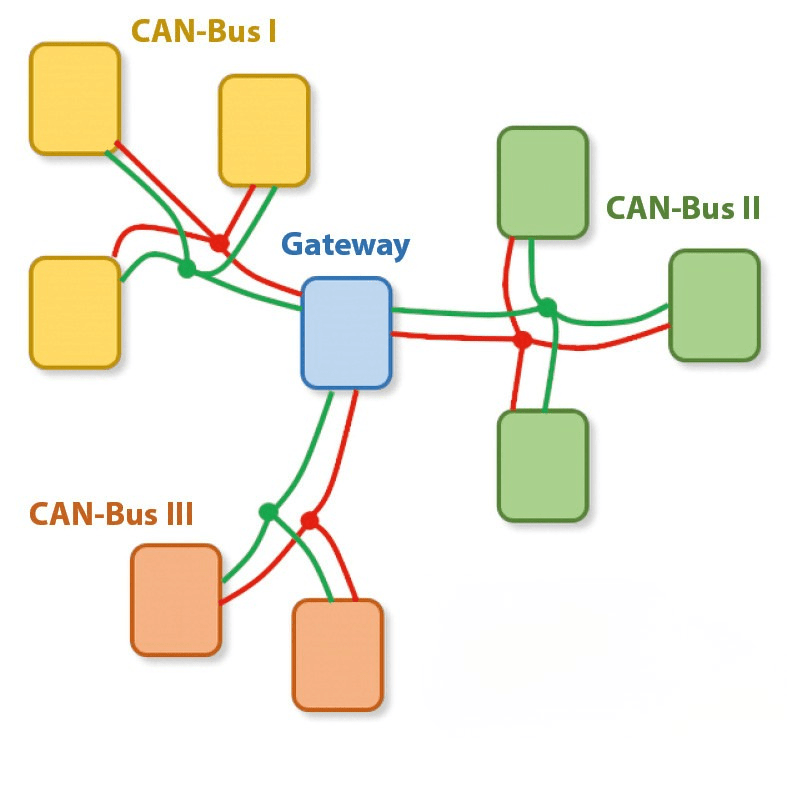
Durch die zunehmende Datenflut waren Automobilhersteller gezwungen, mehrere CAN-Busse in einem Fahrzeug einzusetzen und die Daten so zu verteilen, dass ein herkömmlicher CAN diese bewältigen konnte. Um allerdings Daten von einem Bus auf den anderen zu übertragen, sind Gateway-Steuergeräte notwendig. Je mehr Daten hier ausgetauscht werden müssen, desto leistungsfähiger muss das Gateway sein. Durch den Einsatz von CAN-FD ist es möglich, CAN-Busse wieder zusammenzufassen, sodass einfachere Gateway-Steuergeräte eingesetzt werden können.
Alle Bussysteme, die mit höheren Datenübertragungsraten arbeiten, benötigen bei der Vernetzung Abschlusswiderstände. Da die Steuergeräte in der Regel parallel vernetzt sind, spielt es eine untergeordnete Rolle, an welcher Stelle die Abschlusswiderstände verbaut sind. Entscheidend ist, je schneller die Übertragung erfolgt, desto geringer ist der Wert des Gesamt-Abschlusswiderstands. Im High-Speed-CAN liegt dieser Wert bei rund 60 Ohm, beim deutlich schnelleren FlexRay werden Abschlusswiderstände zwischen 40 Ohm und 45 Ohm eingesetzt.
Abschlusswiderstände unterbinden Reflexionen und somit Überlagerungen.
Auch der CAN-FD benötigt Abschlusswiderstände. Die Werte sind zunächst identisch mit denen im High-Speed-CAN und somit einen Gesamtwert von zirka 60 Ohm aufweisen. Ob die Hersteller nach dem Umstieg auf CAN-FD auf niedrigere Werte zurückgreifen, bleibt abzuwarten. Es empfiehlt sich in jedem Fall, bei der Fehlersuche an einem CAN-FD-System die Herstellervorgaben zu beachten.
Mehr Daten
CAN-FD ist in der Lage, mehr Daten als der High-Speed-CAN zu übertragen, und das in kürzerer Zeit. Das wirkt sich nicht nur auf den internen Datenaustausch aus. Auch die Fehlerabfrage, das Aufspielen einer neuen Software beziehungsweise das Flashen von Steuergeräten, gelingt deutlich schneller. Mittlerweile ist es zwar möglich, mit Hilfe von Ethernet Daten auf ein Fahrzeug aufzuspielen, die Verteilung der Daten auf einzelne Steuergeräte erfolgt allerding häufig über den CAN-Bus. Dies ist der Grund, warum derartige Updates extrem zeitaufwendig sind. In einem CAN-FD-Netzwerk verringern sich die Zeiten deutlich.
Analog zum CAN-Bus verwendet auch der CAN-FD zwei Datenrahmen. Das ‚FD Base Frame Format‘ verwendet Botschaften mit einem 11-Bit-Identifier. Das ‚FD Extended Frame Format‘ nutzt den erweiterten Identifier bestehend aus 29 Bits. Beide Formate sind in der Lage, maximal 64 Byte Nutzdaten zu senden.
Das CAN-FD Datenprotokoll
Im Vergleich zum Standard CAN-Protokoll ändert sich bei CAN-FD einiges. Die wichtigsten Änderungen finden sich im Kontrollfeld. CAN-FD-Controller müssen in der Lage sein, sowohl herkömmliche CAN als auch CAN-FD Botschaften zu senden. Die Entscheidung darüber, um welche Art von Botschaft es sich handelt, erfolgt im FDF (Flexible Data-Rate-Format) Bit.
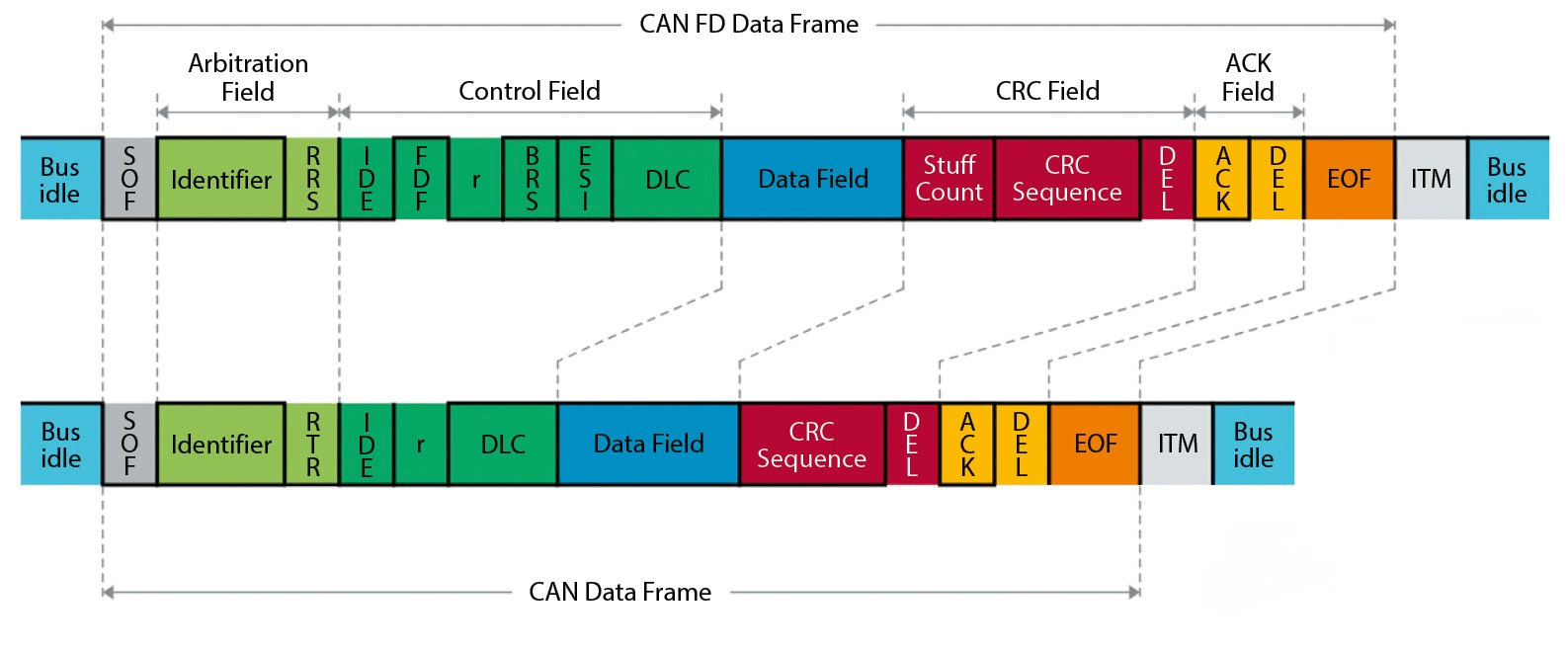
Diese Stelle wurde im CAN-Bus als Reservebit vorgehalten und war immer dominant (logische Null). Wird dieses Bit nun rezessiv also mit einer logischen Eins gesendet, so erkennen die Empfänger, dass es sich um eine CAN-FD Botschaft handelt.
Mit Hilfe des BRS (Bit-Rate-Switch) wird festgelegt, mit welcher Geschwindigkeit die Daten gesendet werden sollen. Es gibt hier zwei Möglichkeiten, die Geschwindigkeit des klassischen CAN-Bus sowie die erhöhte Geschwindigkeit bei einer CAN-FD-Botschaft. Beide Geschwindigkeiten sind vom Hersteller für den gesamten Bus festgelegt und können innerhalb des Busses nicht variieren. Bis zum BRS-Bit überträgt der Bus mit der langsameren CAN-Bus-Übertragungsrate. Sollte das Bit dominant gesendet werden, so wird die gesamte Botschaft mit dieser Übertragungsrate (z.B. 500 kBit/s) gesendet. Ist das Bit rezessiv, so schaltet der Sender ab diesen Moment auf die erhöhte Geschwindigkeit um (z.B. 5 Mbit/s). Diese deutlich höhere Übertragungsrate wird bis zum Bestätigungsfeld aufrechterhalten. Erst ab dem Acknowledge-Signal wird wieder auf die langsamere Geschwindigkeit gewechselt.
FDF = 0 ➔ CAN-Botschaft
FDF = 1 ➔ CAN-FD-Botschaft
BRS = 0 ➔ unveränderte Übertragungsrate
BRS = 1 ➔ Wechsel in die höhere Bitrate
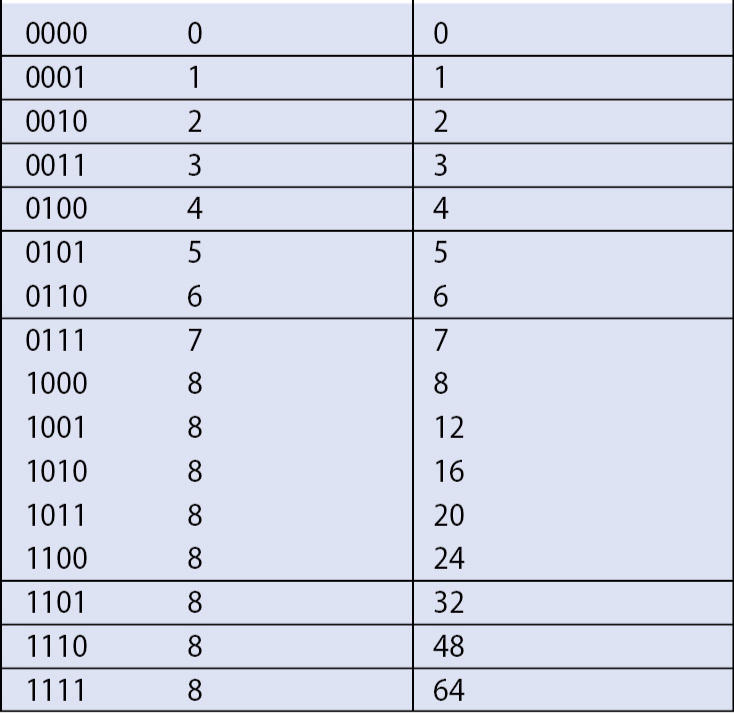
Das bereits im klassischen CAN-Protokoll vorhandene DLC (Data-Length-Field) wird im CAN-FD komplett ausgereizt. Mit Hilfe der vierstelligen Dualzahl wird den Empfängern mitgeteilt, wie groß das Datenfeld sein wird.
Aufgrund dessen, dass mit CAN-FD innerhalb einer Botschaft bis zu achtmal mehr Daten übertragen werden können, ergibt sich, dass die Prüfsumme im Sicherungsfeld unter Umständen größer ist. Hierdurch ergeben sich für eine Übertragung von bis zu 16 Bytes 17 CRC-Bits und darüber hinaus 21 CRC-Bits. CRC steht für Cyclic-Redundancy-Check (zyklische Redundanzprüfung) und dient zur Bestimmung eines Prüfwerts, um Fehler bei der Übertragung von Daten erkennen und gegebenenfalls sogar selbständig beheben zu können.
Fehlerdiagnose an vernetzten Systemen
5. erweiterte Auflage 2024 von Martin Frei, 176 Seiten, 144 Abbildungen/Grafiken, 49,95 Euro






Danke für die wirklich sehr gute Erklärung des CAN FD Buses.
Leider hat sich diese Art der Vernetzung gerade mit erscheinen der neuen Klasse bei BMW, Mercedes Benz CLA und auch HV-Plattform PPE von Audi als „Haupt“ Netzwerk in den Fahrzeugen selbst überholt. Wie befürchtet setzen fast alle Hersteller auf Automotive Ethernet und Flexray, CAN und CAN FD kommen nur noch proprietär als SUB Busse zum Einsatz.